MGK-Energieumwandlung
[STEC/H3]

Drehstromasynchronmaschine
Aufbau allgemein
| Stator: | Rotor: |
|
|
Im Läuferblechpacket kann auch eine Drehstromwicklung in den Nuten liegen, die auf drei Schleifringe herausgeführt und dort verschaltet wird. |
| Der Läuferkäfig besteht aus Querstäben die an beiden Seiten durch Kurzschlussringe kurzgeschlossen werden. Die Stäbe samt Kurzschlussringen werden bei modernen Rotoren direkt in das Blechpacket eingegossen (Aluminium-Druckguss-Verfahren). |  |
Funktion
Wieso dreht sich aber der Asynchronmotor, ohne dass sein Läufer mit Spannung versorgt wird?
Das Induktionsprinzip des Transformators
Eine Asynchronmaschine ist im Stillstand nichts anderes als ein Drehstromtransformator mit kurzgeschlossener Sekundärwicklung.
Im Rotor wird daher transformatorisch eine Spannung induziert. Diese Wirkung ist aber drehzahlabhängig.
Die Asynchronmaschine ist eine INDUKTIONSMASCHINE.
Drehmomentbildung
Im Stator der Maschine wird ein  Drehfeld erzeugt. Dieses Drehfeld schneidet die Rotorstäbe und induziert so im Käfig eine Läuferspannung.
Der Käfig wirkt wie eine Leiterschleife also fließt in ihm ein Strom (siehe unten).
Drehfeld erzeugt. Dieses Drehfeld schneidet die Rotorstäbe und induziert so im Käfig eine Läuferspannung.
Der Käfig wirkt wie eine Leiterschleife also fließt in ihm ein Strom (siehe unten).
Der Rotor der Asynchronmaschine läuft langsamer als das Drehfeld, weil in ihm eine Spannung durch das Drehfeld induziert werden muss. Der Drehzahlunterschied zwischen Drehfeld und Läufer heißt Schlupf.
Der Schlupf s wird in Prozent der Synchrondrehzahl nS angegeben. Die Läufer- oder Rotordrehzahl nL ist im Motorbetrieb immer kleiner, als die nächst höhere Synchrondrehzahl. Die Berechnung ist eine simple Prozentrechnung:
Das Drehmoment M des Asynchronmotors ist von der Drehzahl n und vom Rotorwiderstand RL abhängig. Die folgende Kennlinie zeigt den typischen Verlauf und die Abhängigkeit in einem Diagramm:
MA......Anlaufmoment
MS......Sattelmoment (das tiefste Drehmoment während des Hochlaufens)
MK......Kippmoment (das höchste Drehmoment während des Hochlaufens)
MN......Nennmoment (das Drehmoment bei Nennbelastung)
Bauformen allgemein
Die Asynchronmaschine unterscheidet sich durch verschiedene Arten von Läufern:
- Kurzschlussläufermotor
- Schleifringläufermotor
- Rundstabläufer
- Profilstabläufermotor
- Reluktanzmotor
Verwendung allgemein
- wichtigster Antrieb
- bei Werkzeugmaschinen oder Pumpen bis einigen MW
Betrieb als Motor
Die Maschine nimmt aus dem Stand einen hohen Anlaufstrom auf, der sich während der Anlaufphase bis zum Nennstrom verringert. Das folgende Diagramm zeigt den prinzipiellen Stromverlauf:
Das Diagramm zeigt auch, dass beim Abbremsen des Motors (das tut nun mal jede Last) der Strom rlativ stark ansteigt. Der Motor wird immer mehr zur Heizung. Die Wicklung muss daher gegen Überlastung geschützt werden.
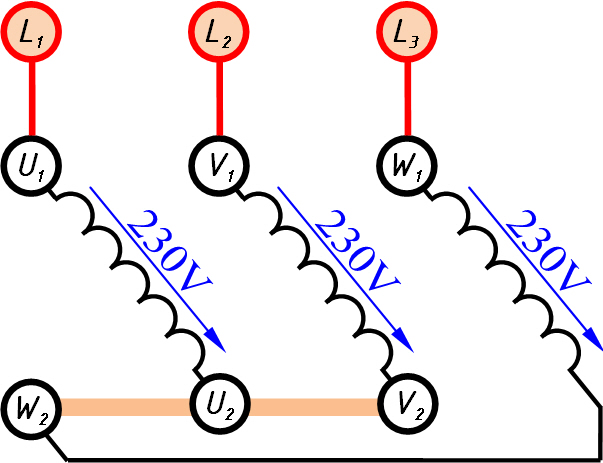
Schaltung
Zusammenfassung
| Begriff | Erläuterung |
|---|---|
| Induktionsmaschine | Das Ständerdrehfeld induziert ein Läuferfeld, das dem Drehfeld nacheilt. |
| Anlauf | Mit zunehmender Rotordrehzahl sinkt
|
| Drehmoment | Der hohe Anlaufstrom ( |
| Leerlauf | Der Leistungsfaktor cosφ ist sehr klein (0,3 bis 0,5), weil praktisch nur der Magnetisierungsstrom fließt. (siehe Laborübung) Ausnahme: Strom zur Deckung der Verluste (Cu; Fe; Streuung und Reibung) |
| Belastung | Durch die Abgabe von immer mehr Wirkleistung (Wellenleistung) verbessert sich der Leistungsfaktor (siehe Laborübung) |
| Anlasseinrichtungen |
|
Kurzschlussläufermotor
Rundstabläufer
Der Stator ist grundsätzlich bei allen Asynchronmaschinen gleich. Der wesentliche Unterschied ist durch den Querschnitt (kreisförmig) der Stäbe des Rotorkäfigs gegeben:
 |
 |
| hier ist nur jeder zweite Stab gezeichnet | hartgelöteter oder geschweißter Kupferkäfig |
Betriebsverhalten
Das Betriebsverhalten wird bei Antrieben in der Drehmoment-Drehzahl-Kennlinie deutlich:
| Im Einschaltmoment | hoher induktiver Rotorwiderstand |
|
| Im Betrieb | sehr kleiner Rotorwiderstand (sowohl Wirk- wie Blindwiderstand) |
|
Baugrößen
- bis ca. 1kW Nennleistung
- über 300kW muß die Maschine wegen schlechter Anlaufeigenschaften mit Hilfsmotoren hochgefahren werden
Stromverdrängungsläufer
Der Stator ist wieder ein Drehstromstator. Die Rotorstäbe besitzen nun besondere Querschnitte.
Betriebsverhalten
Das Betriebsverhalten im Vergleich lässt sich aus der oben abgebildeten Drehmoment-Drehzahl-Kennlinie deutlich unterscheiden:
Im Einschaltmoment |
Stromverdrängung:
von innen nach außen |
Rotor innen (viel Eisen = viel XL),
Strom fließt außen (= Querschnittsverkleinerung) RLäufer wird größer hoher RLäufer:
|
Im Betrieb |
keine Stromverdrängung mehr | im Rotor fließt beinahe Gleichstrom (= sehr wenig XL) mehr. Der Rotorwiderstand ist nun klein. |
Schleifringläufer
- Drehstromstator
- Rotor mit Drehstromwicklung (in Stern geschaltet) oder Zweiphasenwicklung (L - Schaltung)
- Wicklungsenden sind auf Schleifringe geführt (Anschlüsse: k, l, m)
Wendeschaltung mit einem Schleifringläufer
Das Hauptaugenmerk soll auf dem sogenannten Läuferanlasser liegen, der als Stellwiderstand angeschlossen an den Schleifringen k, l, m dargestellt ist.
Wirkungsweise
Uns ist bekannt, dass der Läuferwiderstand RL eine Erhöhung des Anlaufmomentes MA bewirkt. Genau das wird bei der Zuschaltung von Widerständen in den Läuferkreis des Schleifringläufers ausgenützt. Beim etwa fünffachen Läuferwiderstant (5RL) ist mit dem höchst möglichen Anlaufmoment (MA = MK) zu rechnen. So kann der Stell- oder Stufenwiderstand Rv bemessen werden.
Durch transformatorische Wirkung (ILäufer braucht IStänder)) kann der aufgenommene Strom begrenzt werden. Ein durch Widerstände verringerter IL verringert gleichzeitig den aufgenommenen Strom I1.
Verwendung
In Mühlen, Krananlagen und Seilbahnen war dieser Antrieb sehr gefragt, weil es möglich war, auch ohne Stromrichter das Anzugsmoment oder die Drehzahl zu steuern. Die technische Entwicklung der Stromrichterantriebe macht den Einsatz dieser nicht ganz billigen Maschine (zwei Wicklungen sind nötig) seltener.
Polumschaltbare Motoren
Die Drehfelddrehzahl (= Synchrondrehzahl

Daher gibt es zwei Möglichkeiten, die Drehzahl zu verstellen:
- durch Frequenzumrichter
- durch Wicklungen mit verschiedenen Polpaarzahlen
Getrennte Wicklungen
In einem Stator können mehrere Wicklungen mit verschiedenen Polzahlen untergebracht werden.
Pol - Amplituden - Modulation (PAM)
PAM bedeutet, dass durch unterschiedliches Verschalten einer Wicklung mit dem Netz verschiedene Drehzahlen erreicht werden können. Ein bekanntes Beispiel dafür ist die Dahlanderwicklung.
Dahlander-Schaltung
- Je nach Version (Δ/YY oder Y/YY) unterscheidet sich die Stromaufnahme des Motors in beiden Drehzahlen.
Für beide Geschwindigkeiten werden verschiedene Motorschutzschalter benötigt!
- Das Drehzahlverhältnis ist immer geradzahlig:
langsam 1 3 --- = --- oder ... schnell 2 6 - Trotz der Drehzahlverdoppelung erhöht sich die Leistung nur etwa um 30%. (PYY = 1,3.PD), weil die Durchflutung bei höherer Polzahl kleiner ist.
Δ/YY - Schaltung
MNΔ 1 --- = --- MNYY 1
Y/YY - Schaltung
MNY 3 ---- = --- MNYY 4
Drehstrommaschine am Einphasennetz
Jeder Drehstrommotor kann bei Wechselstrom betrieben werden, wenn die Strangspannung der vorhandenen Wechselspannung entspricht. (
Steinmetzschaltung
Der Kondensator kann durch eine Messung der Strangspannungen und -ströme genauer bestimmt werden. Dabei treten im Leerlauf die höchsten Spannungs- und Stromwerte auf. Bei Belastung sinken die Werte um etwa 10%.
Einphasenasynchronmaschine
Wirkungsweise - Induktionsprinzip
Ein Statordrehfeld induziert im Kurzschlussläufer eine ULäufer. Der Läuferstrom erzeugt seinerseits ein Rotorfeld, das dem Drehfeld nacheilt.
Drehfeldbildung
allgem.: phasenverschobene Wechselströme, die durch räumlich versetzte Spulen fließen, erzeugen ein
| Drehfeld | |
|---|---|
| 3~ | 1~ |
| 3 x 120° el. verschobene IL | 2 x 90° el. verschobene IStr |
| 3 x 120° räumlich versetzte Spulen | 2 x 90° räumlich versetzte Spulen |
| durch Drehstrom in Drehstromwicklung entsteht ein Drehfeld | durch Wechselstrom in Haupt- und Hilfsstrang entsteht ein elyptisches Drehfeld |
Bei der Einphasenasynchronmaschine wird die 90 grädige Phasenverschiebung durch
- Kondensator in Reihe zum Hilfsstrang (kapazitiver Strom)
- oder Erhöhung des Wirkwiderstandes im Hilfsstrang
erreicht.
Bauart
Der Rotor ist immer ein Kurzschluss- oder Käfigläufer. Die Bauarten lassen sich also nach der Art der Drehfeldbildung (ΦD) unterscheiden.
Spaltpolmotor
Der Magnetische Hauptfluss ΦH wird in der Hauptwicklung erzeugt und schließt sich über die Hauptpole. Die Kurzschlussringe (Sekundärwicklung) in den Spaltpolen erzeugen einen zeitlich und räumlich versetzten Fluss. Dadurch entsteht ein Drehfeld.
Der Spaltpolmotor besitzt einen schlechten Wirkungsgrad (η = 0,6) - ein Teil der Leistung wird im Kurzschlussring bewußt verheizt - und ein relativ kleines Drehmoment.
Verwendung: Hauptsächlich als Lüfterantrieb oder für kleine Pumpen bis ca. 300W.
Kondensatormotor
Aufbau:
Der Läufer ist meistens ein Kurzschluss- und selten ein Schleifringläufer. Der Stator ist entweder der einer normalen DSM oder ein spezielles Blechpacket mit unterschiedlichem Nutenquerschnitt für den Haupt- und den Hilfsstrang.
Wicklung:
- 2/3 Hauptstrang (U1 - U2)
- 1/3 Hilfsstrang (Z1 - Z2)
Wirkungsweise:
Der Haupt- und Hilfsstrang sind parallelgeschaltet. Der Hilfsstrang wird durch den Kondensator überkompensiert.
So entsteht zwischen den Strömen (im Hauptstrang fließt
Die geometrische Summe der Strangströme ergibt den Motornennstrom. (idealerweise mit leichter induktiver Phasenverschiebung, die sich bei Belastung aufhebt;)
Der Betriebskondensator kann durch folgende Überlegung gefunden werden:
| Die Blindleistung des Kondensators soll 30% höher als die Motorleistung gewählt werden: | |
| aus dem Zeigerbild ergibt sich die Näherungsrechnung: |  |
Die Rechnung ergibt eine anschauliche Kennlinie:
Motor mit Widerstandshilfswicklung
Der Hilfsstrang besitzt eine hohe Windungszahl und ist mit deutlich dünnerem Draht gewickelt. So ist der Wirkwiderstand des Hilfsstranges viel höher als sein Blindwiderstand. Das führt zu einer beinahe 90-grädigen Phasenverschiebung der Strangströme.
Motor mit Bifilarwicklung
Der Blindwiderstand des Hilfsstranges kann auch durch gegensinnig gewickelte Spulen verkleinert werden.