 home Themen aus:
Spezielle Technologie |
E-Technik + Angew. Mathematik |
ET Labor |
Projektplanung |
home Themen aus:
Spezielle Technologie |
E-Technik + Angew. Mathematik |
ET Labor |
Projektplanung | MGK-Bürstenlose Motoren (Antriebstechnik Grundlagen)
[STEC/H1]

Ursprung der GSM
Eine ursprüngliche Idee eines Gleichstrommotors mit Ringanker stammt von einem belgischen Modelltischler namens Zénobe Théophile Gramme.
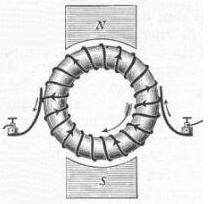
1866 demonstrierte dann Werner Siemens das dynamoelektrische Prinzip mit seiner "modernen Dynamomaschine", auf dessen Prinzip bis heute der PMDC-MotorPermanent Magnetic DC (= Gleichstrom)-Motor folgt.
Konstruktionszeichnung der Dynamomaschine von 1866 (Techn. Museum München)
Permanentmagnete ersetzen die Erregerwicklung
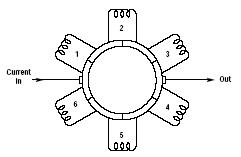
Moderne Gleichstrommotoren werden nach den gleichen Prinzipien wie "Grammes Ring" kommutiert, nur dass eine Ankerwicklung viel effizienter ist.
Der größte Nachteil der Maschine ist die starke Funkenbildung an Bürsten und Kommutator bei Belastung. Das sogenannte Bürstenfeuer beschädigt den Kommutator und führt zu einem starken Abbrand der Bürsten. Der klassische Gleichstrommotor ist wartungsintensiv.
BLDC-Motoren (Brushless DC-Motor)
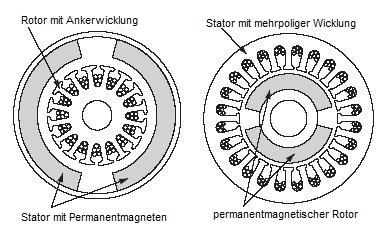
links der übliche bürstenbehaftete PMDC-Motor, rechts der bürstenlose BLDC-Motor.
Die Ankerwicklung tauscht beim bürstenlosen Motor den Platz mit der Erregerwicklung. Damit kann der Strom ohne schleifende Kontakte und dem damit verbundenen Verschleiss zugeführt werden.
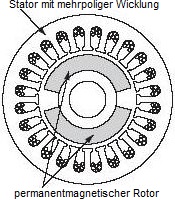
Aufbau eines BLDC-Motors
Teile des BLDC-Motors
Elektronische Kommutierung
Dank elektronischer Kommutierung kann das Bürstenfeuer vermieden werden, da es keine rotierenden Kontakte mehr gibt.
Ein weiterer Vorteil der Anordnung der Wicklungen im Stator besteht darin, dass sich Wicklungsverluste im Stator leichter kühlen lassen (Stator mit Kühlrippen).
Die Wicklungen werden über Halbleiterschalter (Transistoren) umgepolt. Die Lage des Rotors wird mit magnetfeld-empfindlichen Hallsensoren erfasst.
BLDC-Motorkommutierung: Die Winkelposition des Rotors wird vom Hallsensor erfasst.
Diese Signale steuern über den Wechselrichter den Anschluss der "Dreiphasenwicklung" des Stators.
Wechselrichter: Sechs Halbleiterschalter werden
an eine Gleichspannung angeschlossen und so getaktet,
dass durch die Schaltfolge eine Art Drehstromspannungssystem entsteht.
Die Statorwicklung ist einer Drehstromwicklung vergleichbar.
Mit Hilfe von sechs Halbleiterschaltern wird die Gleichspannung "zerhackt".
Die Impulsfolge der zerhackten Gleichspannung ähnelt einer dreiphasigen Spannung.
Eine Schaltsequenz besteht aus sechs Schritten.
Die Transistorschalter werden durch eine Steuerlogik so angesteuert, dass zu jedem Zeitpunkt zwei Schalter in unterschiedlichen Zweigen geschlossen sind. D.h. Ein Transistor schaltet das Plus der andere das Minus.
Der dritte Zweig ist "offen".
Die drei Phasen sind hier mit A, B und C bezeichnet, die Spannungen sind UAB, UBC und UCA mit der Speisespannung UD
Strangspannung
Wenn man sich Quelle als symmetrisch geteilt vorstellt, also die Spannung in 2 x UD/2 aufteilt, kann der “0-Punkt” herausgeführt werden. So wird
- der “+” Anschluss der oberen Spannungsquelle +UD/2 gegen den “+” Anschluss der unteren Spannungsquelle
- der “-” Anschluss der oberen Spannungsquelle entspricht dem “+” Anschluss der unteren Spannungsquelle und ist 0V oder Masse
- der “-” Anschluss der unteren Spannungsquelle -UD/2 gegen Masse
Es bleibt bei 6 Schritten, aber in jedem Schritt sind nun zwei Phasen enthalten
Wenn wir die Quelle mit drei Strängen belasten, wird daraus das bekannte Drehstromsystem mit den drei Strangspannungen UA0, UB0 und UC0 mit der Amplitude UD/2. Wenn eine (symmetrische) Drehstromlast in Y angeschlossen ist, ist in jedem Schritt der Schaltsequenz eine Phase auf +UD/2 gegenüber einer anderen auf -UD/2, das heißt, die Spannung Phase gegen Phase ist immer UD. Wie im Drehstromsystem wird die Masse (der N-Leiter der Anschluss “0”) unnötig. Genauso fällt auch die Aufteilung der Spannungsquelle in zwei Hälften weg.
Drehmomentwelligkeit
Die BLDC-Motorwicklungen werden mit rechteckigen Spannungsimpulsen gesteuert. Motorwicklungen sind starke Induktivitäten, die bei Rechteckimpulsen mit starken Gegeninduktionsspitzen reagieren, so dass es besonders bei niedrigen Drehzahlen zu starken Drehmomentschwankungen mit Vibrationen kommt.
Die Stromimpulse drehen den BLDC-Motor.
In den meisten Anwendungen wird das Ruckeln des Motors durch die Trägheit der Last ausgeglichen.
Der BLDC-Motor wird für einfache Anwendungen, wie drehzahlgeregelte Lüfter und Pumpen häufig eingesetzt. Er ersetzt so häufig den PMDC-Motor.

Zwei BLDC-Motoren werden in einem PC verwendet: Lüfter und Diskettenlaufwerk.
Motorkonstanten
Die Motorspannungskonstante wird üblicherweise als KB bezeichnet (wobei das B für Backemf = engl. für Gegen-EMK, Elektro-Motorische-Kraft oder Gegenspannung steht).
DC-Messung im Betrieb: Die Motorspannungskonstante wird im Leerlauf bestimmt. Dabei wird die Versorgungsspannung UD gemessen und in das Verhältnis zur Leerlaufdrehzahl “n” gesetzt.
AC-Messung: Ohne Steuerung wird der Motor als Generator mit einer vorgegebenen Drehzahl n [U/min] angetrieben. Die abgegebene Wechselspannung zwischen zwei Anschlussdrähten wird mit einem Oszilloskop gemessen. Der Spitzenwert der sinusförmigen Wechselspannung entspricht der Gleichspannung.
Die Motordrehmomentkonstante KT(wobei T für Drehmoment - engl. Torque - steht). Sie gibt das Verhältnis zwischen Drehmoment M und Motorstrom I an.
Mit diesen Konstanten berechnet man das Drehmoment und die Drehzahl des BLDC-Motors gleichermaßen wie jene des PMDC-Motors. Zwischen KBund KT besteht folgender Zusammenhang:

60/2π ist der Umrechnungsfaktor zwischen V / U / min und V / rad / s
Der Wirkwiderstand R und die Induktivität L der Wicklung liegt bei dieser Ansteuerung zwischen zwei Phasen. Bei Berechnungen entspricht dann R und L im BLDC-Motor mit Statorwicklung RA und LA der Ankerwicklung eines PMDC-Motors.
Berechnung eines DC-Motors mit den beschriebenen Motorkonstanten:
Für Berechnungen des BLDC-Motors verwenden wir dasselbe Modell wie für den normalen Motor PMDC-Motor.
PMS-Motor (Permanentmagnet Synchronmotor)
Wenn man ein gleichmäßiges und konstantes Drehmoment braucht, sollte statt eines BLDC- ein PMS-MotorPermanent Magnetic Synchronous verwendet werden. Die Steuerung ist dann aber erheblicher aufwändiger.
Leistungsverstärker mit PMSM Maschine.
Der PMS-Motor ähnelt dem BLDCBrush Less DC-Motor. Er unterscheidet sich gegebenenfalls durch die Ausbildung der Rotormagnete aber ganz wesentlich durch die Ansteuerung der Statorwicklung.
Ansteuerung der PMS-Motorwicklung
Die Mittelwerte der Impulse folgen einer Sinuskurve.
Pseudo-Sinus-PWM-Signal.
Der BLDC-Motor erzielt sein Drehmoment, indem die Wicklung mit möglichst konstanten Stromimpulsen beschickt wird. Stattdessen erhält der PMS-Motor "sinusförmige" dreiphasige Ströme (eigentlich Pseudo-Sinus oder Sinus aus PWM-Technologie).
Bei drei um 120° versetzten, sinusförmigen Strömen ergibt die Summe der drei Strangleistungen eine konstante Gesamtleistung.
Eine symmetrische dreiphasige Last
versorgt mit drei sinusförmigen Strömen,
deren quadratische Kurven werden summiert und mit R multipliziert,
ergeben somit die konstante Linie der Gesamtleistung P.
PMS-Motor als Servoantrieb
Der PMS-Motor benötigt eine Versorgungseinheit mit einem erweiterten Controller. Ein Servoantrieb setzt sich aus den folgenden Blöcken zusammen:
Blockschaltbild des PMS-Motors
- Gleichrichter: Das Netzteil mit ein- oder dreiphasigem Anschluss
- Zwischenkreis: Grundsätzlich ein Kondensator, der die Spannung des Gleichrichters glättet (UD= US)
- Wechselrichter: Die UD wird in Drehstrom umgewandelt.
- Stator: Der PMSMotor hat eine Dreiphasenwicklung in Y-Schaltung
- Rotor: Die Rotorpermanentmagnete sind so ausgelegt, dass der magnetische Fluss um den Rotorumfang "sinusförmig" wird. Je nach Polpaarzahl können zwei oder mehr Magnetpole eingebaut werden. Je größer die Polzahl, desto niedriger wird die Motordrehzahl.
- Drehgeber: Die Steuerung benötigt Informationen über die Rotorlage. Hierfür wird ein Encoder oder ein Resolver verwendet.
- Controller: Basierend auf Informationen über die Position des Rotors, wird der Wechselrichter über die Steuereinheit gesteuert. Dabei wird überprüft, ob die generatorisch erzeugte Wechselspannung aus der Drehstromwicklung in Phase zur erzeugten Steuerspannung ist. Das ergibt die optimale Dynamik des Servoantriebs.
Vorteile des PMS-Motors
- Hoher Wirkungsgrad. Verluste treten nur in der Statorwicklung auf, welche leicht gekühlt werden kann. Der Rotor weist geringe Verluste auf, da er aus Permanentmagneten besteht.
- Einfache Steuerung von Drehzahl und Drehmoment.
- Gleichmäßiges und vibrationsfreies Drehmoment.
- Keine Verschleißteile - lange Lebensdauer und einfache Wartung.
- Der eingebaute Winkelsensor wird zum steuern benötigt (ein Resolver oder Encoder) kann als Vorteil für Servoanwendungen angesehen werden.
Gleichrichter und Zwischenstufe
Aus Dreh- oder Wechselstrom wird über eine Gleichrichterbrücke der Gleichstrom ID erzeugt. Damit wird ein Glättungskondensator geladen, dessen Größe garantieren soll, dass auch bei entsprechender Stromentnahme die Spannung im Zwischenkreis nicht merklich abfällt (vollständige Glättung).
a) Dreiphasengleichrichter: Wenn die Dreiphasenspannung (Leiterpannung) 400 V beträgt, dann ist die Zwischenspannung 400V×1,414 = 566 V DC.
b) zeigt den einphasigen Gleichrichter. Wenn die einphasige Spannung 230V ist, dann ist die Zwischenspannung 230V×1,414 =325V.
Der Wechselrichter taktet nun die Gleichspannung in unterschiedlichem Puls-Weiten-Verhältnis (PWM-Modulation) so, dass je Strang ein sinusförmiger Wechselstrom zu fließen kommt. Dafür braucht es die "stromträge" Induktivität der Motorwicklung. In den drei Strängen sind die Ströme wie üblich 120° elektrisch versetzt.
Wenn die Zwischenkreisspannung
| UGl = 400V × 1,414 = 566 V ist, wird UL = 566 / 1,414 = 400V. | UGl = 230 × 1,414 = 325 V ist, wird UL = 325 / 1,414 = 230V. |
Ausgehend von
- einer einphasigen Wechselspannung mit UStr = 230 V oder
- einer dreiphasigen Wechselspannung mit UL = 400 V
Wechselrichter
Der Wechselrichter formt nun die Zwischenspannung (Gleichspannung) in eine dreiphasige Spannung für den PMSY-Motor um.
Die Spitzenspannung der UL ist gleich der Zwischenspannung ÛH = UD
Die Zwischenspannung von 566 V wird zur Leiterspannung des PMS-Motors(UL) 566 / 1,414 = 400 V.
Die Ausgangsspannung ist praktisch gleich der Eingangsspannung, lediglich die frequenz variiert.
Der Wechselrichter liefert sinusförmige Drehströme für den PMS-Motor.
Polzahl des Rotors
Der Rotormagnet kann aus vielen magnetischen Polpaaren bestehen. Die Polzahl p ist eine gerade ganze Zahl (2, 4, 6 ...) und bestimmt die Drehzhahl der Maschine.
Je höher die Polzahl, desto kleiner wird die Drehzahl.
Elektromotoren haben in der Regel hohe Drehzahlen und niedrige Drehmomente, während mechanische Anwendungen oft niedrige Drehzahlen
und hohe Drehmomente erfordern. Beim sogenannten Direktbetrieb lassen Sie einen Motor mit einer hohen Polzahl
eine Last ohne Zwischengetriebe betreiben. Das elektrische Herunterschalten erfolgt verlustfrei und ohne Verschleiß von mechanischen Teilen.
Einphasenmodell des PMS-Motors
Drehstromwicklungen sind drei Einphasenwicklungen, so wird zunächst eine Widklung berechnet, und daraus dann rechnerisch auf die Drehstromwicklung umgeformt.
Motorkonstante
Die Spannungskonstante KE wird als Leiterspannung zwischen zwei Phasen (Effektivwert VAC) gemessen. Im Einphasenmodell, muss die Konstante durch die Dreierwurzel geteilt. Der Statorwicklungswiderstand R und die Induktivität L werden ebenfalls zwischen zwei Phasen gemessen, was dem doppelten Wert eines Stranges entspricht.
Så
Hier werden in der Regel die Konstanten des PMSM definiert.
Berechnung des Einphasenmodells
Das Modell der Strangwicklung besteht aus einer Spannungsquelle (EMK) in Reihe mit deem Wicklungswiderstand und der Wicklungsinduktivität.
Die induzierte Spannung wird aus der Drehzahl n und der Spannungskonstante berechnet
K>E.
Da die Spannungskonstante für die Leiter- und nicht die Strangspannung gilt, teilen wir hier mit der Wurzel von drei.
Der Strangstrom ist ein Wechselstrom mit dem Effektivwert I und der Kreisfrequenz w elektrisch.
Der Motor kann eine höhere Polzahl als p = 2 haben. Die elektrische Kreisfrequenz wird dann höher als die mechanische Winkelgeschwindigkeit der Motorwelle
w mek.
Um die maximale Motorleistung zu erzielen, sorgt das Steuergerät für die Spannung U = EF. EF und der Strom I gelten für einen Strang. Auf der Wellen wird daraus:
Pmek = 3 × EF × I(gesamt für drei Phasen).
Durch den Strom entsteht ein Wechselspannungsabfall über dem Wicklungswiderstand und der -induktivität, die wie aus der Wechselstromtehnik bekannt ist ,als zieger addiert werden können.

Das einphasige Modell des PMSM-Motors.
Leiterspannung
UF wird vom Zwischenkreis übernommen. Der Umformer verwendet UD, um die Spitzenspannung der Leiterspannung zu erzeugen. Für den Effektivwert muß noch mit der Wurzel von zwei (aus dem Spitzenwert) und der Wurzel von drei (aus der Leiterpannung) geteilt werden.

Die Motorkonstanten KE und KT sind nicht unabhängig voneinander. Die Spannungskonstante wird von der Leiter- in die Strangwerte und vom Winkel- in Bogenmaß umgerechnet: U / min / Bogenmaß / Sekunde.
Berechnungsbeispiel zur PMS-Maschine


Leistungsverstärker mit PMS-Motor.
Für die Versorgungsspannung von 400 V (UStr = 230 V) ist die Spannung im Zwischenkreis also
- 230V × 1,414 = 325 V oder
- 400 V × 1,414 = 566 V,
Die Versorgung kann den Strom von 1,5 A liefern.
Der PMS-Motor hat ein Drehmoment von 1,5 Nm. Die Polzahl p = 6.
KE = 54 mVmin (0,054 V/rpm)
KT = 0,96 Nm/A
R = 15,5 W (Phase-Phase)
L = 30 mH (Phase-Phase)
der Motor soll das Drehmoment M = 1 Nm entwickeln
dabei soll die Motordrehzahl n = 5000 U / min betragen.
- Reicht der Strom des Servoverstärkers für das gewünschte Drehmoment?
- Reicht die Servoverstärkerspannung für die gewünschte Drehzahl?
- Kann der Servo dreiphasig oder einphasig angeschlossen werden?
Überprüfung der Motorkonstanten:
KT aus KEberechnet:

Die Konstanten stimmen nicht genau mit der "Theorie" überein
Der Motorstrom ist proportional zum Lastmoment. I =
M / KT = 1 / 0,96 = 1,04 A.
Im Vergleich zu den erforderlichen 1,04A hat der Servoverstärker mit 1,5 A ausreichend Reserve.
Zur Berechnung des Spannungsbedarfs müssen alle Spannungen (als Zeiger) summiert werden



UL ist senkrecht zu UR und EF. Die Spannungen können daher mit dem Satz von Pythagoras zusammengefasst werden.

Die Umrechnung aus dem Einphasenmodell ergibt:

Das Ergebnis zeigt, dass der Motor zusammen mit dem Servoverstärker für eine Drehstromanschluss geeigenet ist (566 < 406), die
Spannung aber nicht ausreicht, wenn der Servoverstärker einphasig angeschlossen wird (325 < 406).
Wollen wir hoffen, dass es nicht so weit bis zum nächstgelegenen Kraftwerk mit Drehstrom ist.