 home Themen aus:
Spezielle Technologie |
E-Technik + Angew. Mathematik |
ET Labor |
Projektplanung |
home Themen aus:
Spezielle Technologie |
E-Technik + Angew. Mathematik |
ET Labor |
Projektplanung | SRT-Gebäudeleittechnik
[STEC/H1]

Aufgaben in der Hausleittechnik
Die Gebäudeleittechnik erleichtert den Unterhalt, den Betrieb und die Bedienung vieler unterschiedlicher Anlagen. Die Aufgabe ist das zentrale und übergeordnete Steuern, Bedienen und Anzeigen (Überwachen) verschiedener elektrischer Komponenten.
- Konventionelle Installation (Binäre und Analoge Ein- Ausgänge)
- Raumsteuerung (schalten, bedienen, anzeigen oder melden)
- Beleuchtungssteuerung (Schalten, Dimmen, Sensorsteuerung, Lichtszenen, ...)
- Rollladen - und Jalousiesteuerung (Fahren, Lamellen, Sturmüberwachung, ...)
- Heizungs- und Klimatisierungssteuerung (Heizen, Kühlen, Lüften)
- Zentralfunktion
- Alarmsystem
- Energie- und Lastmanagement
- Visualisierung: Anzeige- und Steuereinheit, Computer
- Fernsteuerung: Smartphone Überwachung
- Gateway (Schnittstelle zu bzw. Verbindung mit anderen Systemen)
- PC - Personal Computer (Hardware: RS232, USB; Software: OPC, iETS)
- Telefon (POTS, ISDN, GSM, APPS)
Die modernste Art einer solchen Anbindung ist die Binary Unit SystemBUS - Technologie.
Europäischer Installations-Bus (EIB|KNX)
Allgemein
Der EIB ist ein Jeder Busteilnehmer ist gleichzeitig Träger der CPUdezentrales ereignisgesteuertes Bussystem, das sich durch eine hierarchische Gliederung auszeichnet. Physikalisch besteht das System aus mehreren induktiv gekoppelten Zweidrahtlinien, in dem
- die Teilnehmer jeder Linie mit 29V versorgt werden;
- die Informationen durch eine überlagerte Wechselspannung übertragen werden.
Der KNX - BUS ist ein Kommunikationssystem zur informationstechnischen Vernetzung von Geräten, in dem
- die Daten in Datentelegrammen übertragen werden.
- der Informationsaustausch direkt zwischen den Teilnehmern erfolgt.
- die Europäische Norm durch die CENELEC ratifiziert wird.
Unterschied zur konv. Installation
Ein Binary Unit SystemBUS ist praktisch eine Art "Sammelschiene". Alle Befehls- und MesswertgeberSensoren sowie alle Relais, Schütze, MesswertempfängerAktoren werden daran elektrisch parallel über Busankoppler (BA) angeschlossen.
Symbole:
| Busankoppler | Sensor (Taster) | Aktor (Relais) |
|---|---|---|
 |
 |
 |
Einfache Wechselschaltung
Kreuzschaltung mit n Steuerstellen
Eine kurze Geschichte des KNX (früher EIB)
- 1987 Gebrüder Merten, Siemens, und Insta (heute Siemens)
- 1990 Gründung des Herstellerverbandes EIBA
- 1999 Gründung der KNX Association aus:
- EIBA (European Installation Bus Association)
- EHSA (European Home Systems Association)
- BCI (BatiBUS Club International)
Begriffe
| alt | EIB | European Installation Bus |
| EIBA | European Installation Bus Association (Sitz in Brüssel) | |
| ETS | EIB Tool Software (Software zur Programmierung / Parametrierung) | |
| neu | KNX | Nachfolge des EIB (aus 3 verschiedenen Verbänden) |
| KNXA | KNX Association (Sitz in Brüssel) | |
| ETS | Engineering Tool Software (Software zur Programmierung bzw. Parametrierung) | |
Abkürzungen
| AC | Alternating Current |
| AM | Anwendermodul |
| AP | Applikationsprogramm |
| AST | Anwenderschnittstelle |
| B.L.T | Bereich.Linie.Teilnehmer |
| BA | Busankoppler |
| BCU | Bus Control Unit |
| BIT | Binary Digit |
| BK | Bereichskoppler |
| CSMA/CA | Carrier Sense Multiple Access / Collision Avoidance |
| DC | Direct Current |
| DR | Drossel |
| EB | Einbau |
| EEPROM | Electrical Eraseable Programmable ROM |
| EIB | European Installation BUS |
| EIBA | EIB Association |
| EIS | EIB Interworking Standard |
| GA | Gruppenadresse |
| H/U | Hauptgruppe/Untergruppe |
| H/M/U | Hauptgruppe/Mittelgruppe/Untergruppe |
| IR | Infrarot |
| LCD | Liquid Crystal Display |
| LK | Linienkoppler |
| LV | Linienverstärker |
| PA | Physikalische Adresse |
| PEI | Physikal External Interface |
| PL | Power Line |
| RAM | Random Access Memory |
| REG | Reiheneinbaugerät |
| ROM | Read Only Memory |
| SER | Serielle Schnittstelle |
| SV | Spannungsversorgung |
| TN | Teilnehmer |
| TP | Twisted Pair |
| UP | Unterputz |
| USB | Universal Serial Port |
| VK | Verknüpfungskontroller |
| ZF | Zwangsführung |
Aufbau (Hardware)
Betriebsmittel
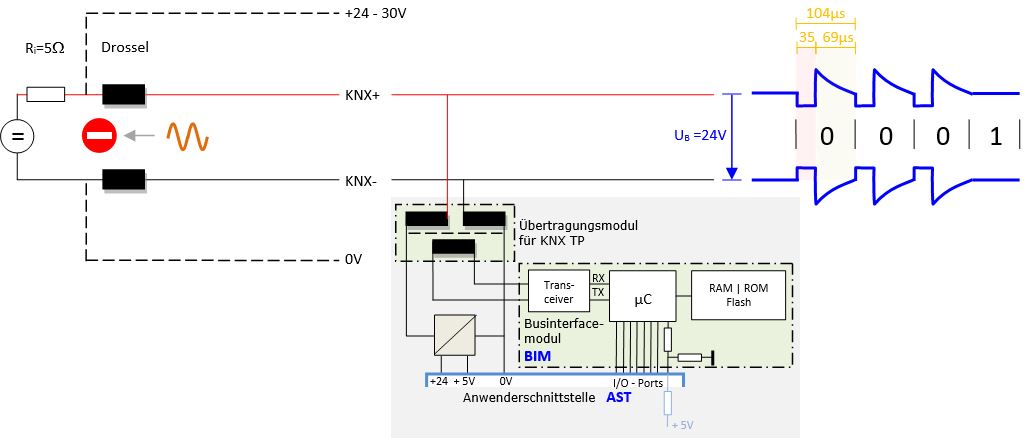
Spannungsversorgung und Drossel
SV Spannungsversorgung 29VDC / 640mA; 24VDC /320mA - ergibt immer logisch EINS [1]
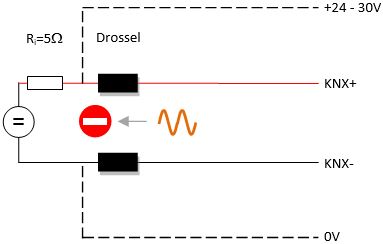
DR Die Drossel übernimmt folgende Aufgaben:
- Entkopplung der Versorgungs- von der Signalspannung
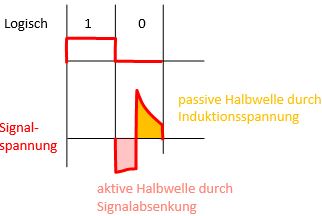
- Erzeugung der Signalwechselspannung aus der abgesenkten Gleichspannung durch den BA (Induktion 3V - positive (passive) Halbwelle für logisch NULL [0])
Teilnehmer
Die meisten Teilnehmer (TLN) sind Sensoren (sensitiv „Input“ – z.B.: Schalter, Fühler…) oder Aktoren (aktiv „Output“ – z.B.: Dimmer, Relais…) und werden über einen Busankoppler mit dem Bus verbunden.
- BA (Busankoppler: Schnittstelle zum Bus - senden, empfangen , bestätigen)
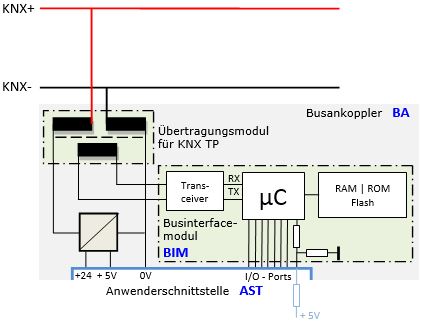
- AST (Anwenderschnittstelle - Steckverbindung)
- AM / BE (Anwendermodul oder Busendgerät: Funktion - Sensoren, Aktoren)
- Unterputzgeräte (UP)
- Reiheneinbaugeräte (REG)
- Einbaugeräte (EB)
Koppler
Der Linienkoppler hat die Aufgabe verschiedene Linien zu verbinden (zu koppeln) und diese dabei galvanisch voneinander zu trennen (siehe Übertragungsmodul).
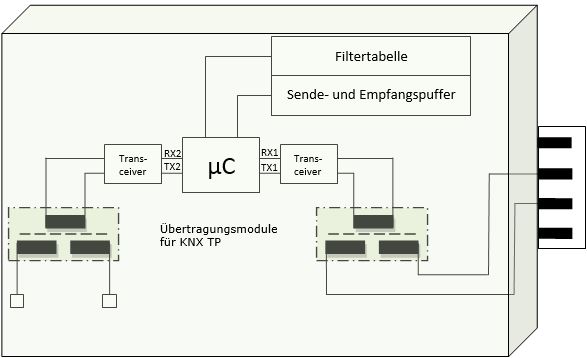
In der Eine Filtertabellte mit Gruppenadressen wird dauerhaft im EEPROM ( engl.: electrically erasable programmable read only memory) geladen.Filtertabelle sind diejenigen Adressen abgelegt, die dem Koppler folgen (Sekundärlinie). Somit gelangen nur die Telegramme (Steuerbefehle) über den Koppler, die für den Austausch der Objekte nötig sind (geringere Busbelastung, weil Telegramme innerhalb einer Linie nicht weitergeleitet werden müssen).
Es werden
- Linienverstärker (X.X.64, 128, 192,)
- Linienkoppler (X.X.0) und
- Bereichskoppler (X.0.0)
Topologie (Installation)
Die BUS - Struktur kann frei gewählt werden
- Linie
- Stern
- Baum
Die maximale Leitungslänge zwischen zwei Teilnehmern beträgt 700 Meter.
Größere Längen machen die Signalübertragung unsicher.
Die gesamte Leitungslänge innerhalb einer Linie darf bis 1000 Meter betragen.
Die Grenze wird durch die Leitungskapazität vorgegeben.
Die Linie
Die kleinste Installationseinheit ist die Linie.
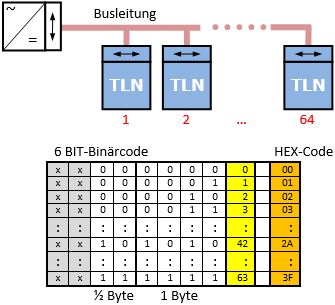
Werden mehr als 64 Teilnehmer in einem Objekt benötigt, kann auf zwei Arten erweitert werden:
- Vergrößerung der Linie durch Linienverstärker (LV) (siehe unten)
- Ankoppeln mehrerer Linien an eine übergeordnete Linie durch Linienkoppler (siehe Bereiche)
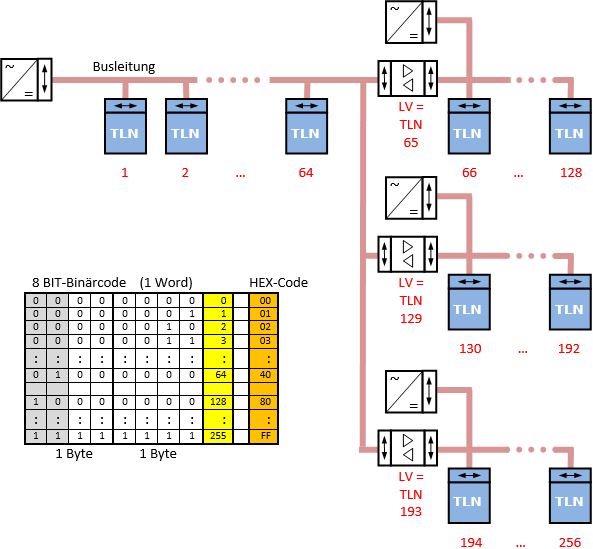
64 Busteilnehmer dürfen an einem Liniensegment betrieben werden. Durch Linienverstärker (LV) kann eine Linie um 3 Liniensegmente erweitert werden (4 x 64 = 256).
Die Bereiche
15 Linien können über Linienkoppler (LK) zu einem Bereich zusammengefasst werden.
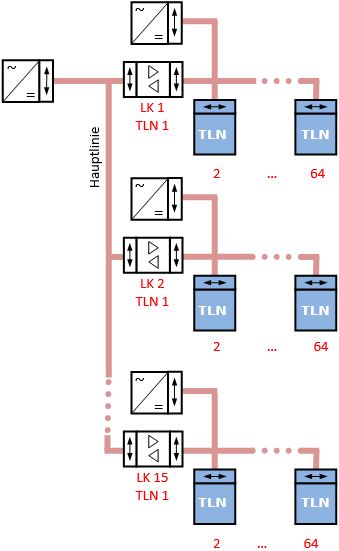
Die Anzahl der Teilnehmer der einzelnen Linien kann in den o.g. Grenzen frei gewählt werden. Damit ergeben sich für einen Bereich im Vollausbau 15 x 64 = 960 Teilnehmer.
Für sehr große Anlagen können noch 15 Bereiche über Bereichskoppler (BK) miteinander verbunden werden.
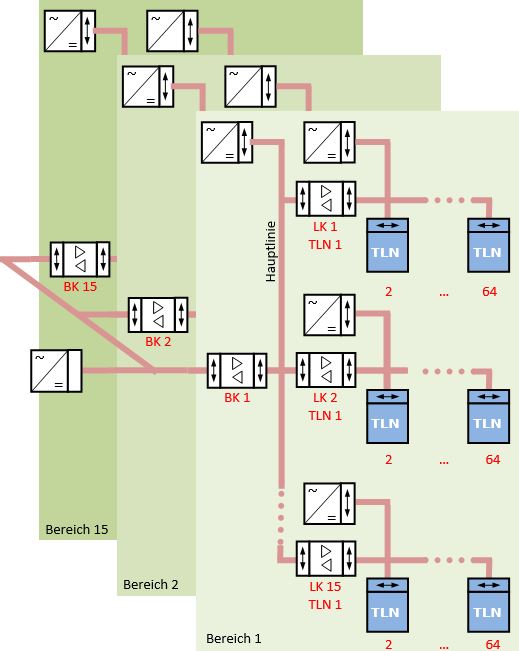
Damit sind insgesamt 64 x 15 x 15 = 14.400 Teilnehmer im Vollausbau möglich. Für jede Teillinie gelten die o.g. Randbedingungen, und jede Linie benötigt ihre eigene Spannungsversorgung.
Werden hier die Linien mit LV vergrößert, stehen insgesamt 256 x 15 x 15 = 57.600 Teilnehmer in einer Anlage zur Verfügung, womit auch sehr große Anwendungen abgedeckt werden können.
Was bringt die Strukturierung der Anlage?
Die optimale Betriebssicherheit kann mit der oben beschriebenen Struktur mit Linienkoppler/Bereichskoppler erreicht werden. Jeder Teilbereich kann auch autark arbeiten und die Koppler haben eine Telegrammfilterfunktion. Es werden nur benötigte Telegramme weitergeleitet und damit der Datenverkehr auf das Notwendige beschränkt.
Linienverstärker sollten immer nur zur nachträglichen Erweiterung eingesetzt werden. Ausnahmen können kleine Objekte sein, bei denen die max. Anzahl von 255 Teilnehmer genügend Reserven für Erweiterungen bietet.
Programmierung / Parametrierung
- PC: ETS x (Software: W3.x/9x/ME/NT/2k/XP/7/??, Hardware RS232/USB)
- Produktverwaltung (Hersteller liefern Geräte und Applikationsprogramme)
- Projektierung (Zusammenstellung von Geräten mit AP)
- Inbetriebnahme (Programmierung der Geräte - Adressen, AP)
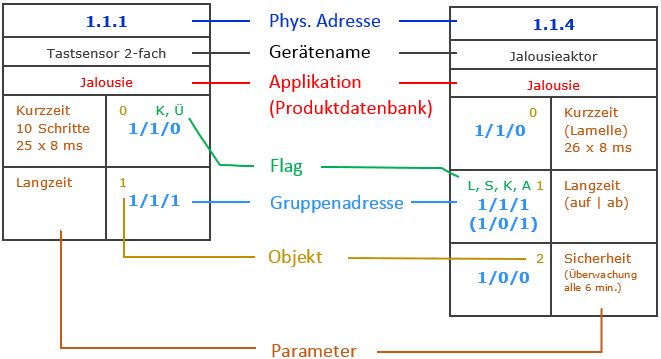
KNX-Flags
Bei jedem Busteilnehmer lassen sich durch die ETS Flags individuell einstellen. Durch das Einstellen der Flags kann das Verhalten des Busteilnehmers geändert werden („Benutzerrechte“). Im Auslieferungszustand sind die Flags auf Standardwerte eingestellt, die nur im Sonderfall geändert werden sollten.
Man unterscheidet| Kommunikations - Flag: K | Hauptschalter | Ist das Kommunikations- Flag gesetzt, hat der Teilnehmer normale Verbindung zum Bus. Wird dieses Flag zurückgesetzt, kann der Objektwert des Busteilnehmers nicht mehr verändert werden. Telegramme werden quittiert. |
| Lesen - Flag: L | auf Anfrage | Ist das Lesen-Flag gesetzt, kann der Objektwert des Teilnehmers vom Bus gelesen werden, ist es deaktiviert, nicht mehr. (Dimmaktor - Helligkeitswert: L setzten - Ü nicht setzen) |
| Schreiben - Flag: S | Veränderung möglich | Bei gesetztem Flag, kann der Objektwert über den Bus geändert werden, ist es zurückgesetzt, nicht mehr. |
| Übertragen - Flag: Ü | bei Wertänderung | Der Objektwert kann zum Bus gesendet werden, wenn das Flag aktiviert ist, andernfalls nicht. (Schaltsensor: Ü setzten – Wert auf Bus übertragen) |
| Aktualisieren - Flag: Akt | auf Antwort „falsch“ reagiert | Wertantwort-Telegramme anderer Busteilnehmer werden als Schreibbefehl interpretiert, d.h. der Wert des Kommunikationsobjektes wird geändert (aktualisiert). |
KNX-Parameter
Die Parameter sind spezielle Einstellungen, die in einem Busteilnehmer projektiert werden.
Verschiedene Parameter Funktionen
- Schalten: Zeit
- Dimmen: Lichtwerte
- LED: Farbe, Objektwert, Orientierungslicht
- Jalousien: Lammellenverstellung, Sturmreaktion
Ein-/ Aus- Funktion
Die Grundfunktion aller Möglichkeiten bietet der 1-Bit-Befehl. Mit ihm können z. B. Lampen ein- und ausgeschaltet werden, oder Jalousien fahren auf und ab.
KNX-Objekte
Alle Busteilnehmer verfügen über einen RAM-Speicherplatz (random access memory) oder ein Register Arbeitsspeicher für jede seiner Funktionen, der den logischen Zustand ("0" oder "1") der jeweiligen Funktion wiederspiegelt. Diese Zustandsinformation wird als Kommunikationsobjekt oder kurz "Objekt" bezeichnet.
Ein Objekt kann als "Briefkasten" oder als ein Bauteil („gelber Draht“) eines Busteilnehmers verstanden werden, der Bustelegramme senden oder auf Telegramme reagieren kann. Z.B. kann die Wippe eines Tastsensors mit dem Kontakt eines Aktors über dieses Objekt kommunizieren.
(Kommunikations-) OBJEKTE sind die Informationsträger des KNX.
Objekte im Sensor
In einem Tastensensor wird eine Wipptaste betätigt. Die Anwendungssoftware überwacht dauernd den Zustand aller Sensoren und erkennt die Betätigung. Das zugehörige OBJEKT (=Speicherplatz) wird auf "Ein" gestellt. Der Zustand der Register (Speicherplätze) im Ankoppelkontroller wird von der Systemsoftware zyklisch in kurzen Abständen ausgelesen und als Nutzinformation, kodiert mit der zuvor zugewiesenen Gruppenadresse, auf den Bus gesendet.
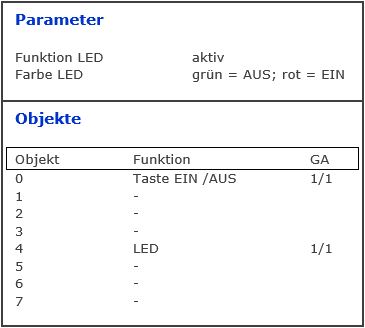
| Objekt O = Kontakt (Wippe) des 1fach Tasters | GA 1/1 |
| Objekt 4 = LED des Tasters (Wippe) | GA 1/1 |
Manche Hersteller vergeben für die LED keine extra Objekte, sie sind dann automatisch der jeweiligen Wippe zugeordnet.
Objekte im Aktor
Die Systemsoftware eines als Aktor wirkenden TN filtert jene Telegramme aus dem Busdaten heraus, die eine der Gruppenadressen als Zieladresse des angesprochenen TN enthalten. Bei der Konfiguration wird dem TN ja auch mindestens eine Gruppenadresse zugewiesen. Wurde ein Telegramm mit einer gültigen Gruppenadresse empfangen, wird die Nutzinformation extrahiert, das Objekt dekodiert und die enthaltene Information in die zur Gruppenadresse gehörenden Speicherstelle des RAMs geschrieben.
Die Anwendungssoftware des Ankoppelkontrollers fragt zyklisch die Speicherplätze/Objekte ab, interpretiert sie und löst auf dem Anwendungsmodul die entsprechende Funktion aus. Im Falle, dass z.B. vom Sensor die Funktion "Deckenbeleuchtung Wohnzimmer Ein" gesendet wurde, wird der entsprechende Binärausgang (= Relais) im Aktor eingeschaltet.
Kommunikationsablauf im "Telegrammstil":
- Wird der Taster (Sensor) betätigt, sendet der Busankoppler ein Einschalttelegramm mit der Gruppenadresse 1/1 auf den Bus.
- Bei der zweiten Betätigung sendet er ein Ausschalttelegramm mit derselben Gruppenadresse 1/1.
- Ein Aktor, bei dem diese Gruppenadresse 1/1 eingetragen worden ist, reagiert auf diese Schaltbefehle (EIN/AUS).
Adressierung (Bus-Kommunikation)
Physikalische Adresse
Jeder Busteilnehmer bekommt vor oder nach dem Einbau eine physikalische Adresse PA. Damit ist die Datenkommunikation untereinander und mit einem PC möglich.
Schema der Physikalischen Adresse
PA Der Teilnehmer ist im Bereich 2, auf der Linie 3 angeschlossen und hat die Nummer 24.2.3.24
Verwendung der PA
- Absenderadresse für alle Telegramme (Fehlersuche)
- Zieladresse für die ETS zur Geräteprogrammierung (AP)
Besondere PA:
| 0.0.0 | Systemadresse (gesamter KNX) |
| 15.15.255 | neuer oder entladener (leerer) Teilnehmer |
Gruppenadresse (GA)
Die Parametrierung („Programmierung“) erfolgt über die Applikation der einzelnen Kommunikationsobjekte. Die TLN werden mittels Gruppenadressen verknüpft.
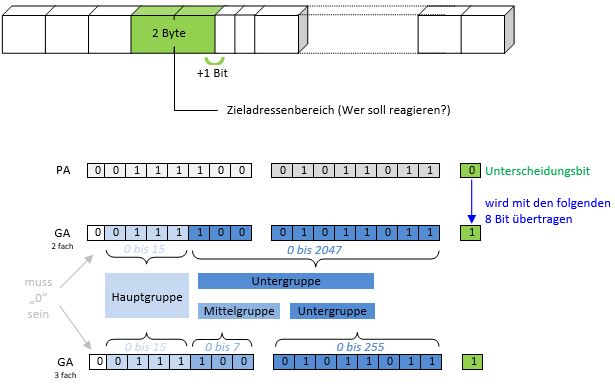
Sie können in zwei Ebenen Hauptgruppe / UntergruppeH/U oder in drei Ebenen Hauptgruppe / Mittelgruppe / UntergruppeH/M/U unterteilt werden.
Im Sendeobjekt des Sensors und im Empfangsobjekt des Aktors müssen die gleichen Zuweisungen (GA) stehen.
Zum Beispiel: In der Hauptgruppe 1 (z.B. Beleuchtung)soll die zugeordnete Untergruppe (z.B. Lichtband 6 schalten) verarbeitet werden.GA 1/6
Verwendung der GA:
- Senden ist pro Objekt nur an eine GA möglich (steht ganz links - ETS)
- Empfangen kann ein Objekt mehrere GA (je nach Projekt; Applikation; Produkt; z.B. - LED).
Umrechnung der Ebenen
3 auf 2 Ebenen
U2 = M3 * 256 + U3
2 auf 3 Ebenen
M3 = U2 / 256 (Ganzzahldivision)
U3 = U2 / 256 (Rest)
Besondere GA:
0/0/0 = ein Rundruf:d.h. die ETS sucht nach gedrückten ProgrammiertastenBroadcastWird beim Busteilnehmer die Programmiertaste gedrückt, leuchtet eine rote LED auf. Nun kann die physikalische Adresse und das Applikationsprogramm in das EEPROM des Busankopplers geladen werden.
Wie arbeitet der EIB?
Die Teilnahme am Busverkehr
Auf dem BUS-Kabel findet sich also ein permanenter Datenstrom (siehe 2.9.2) den alle Teilnehmer, weil sie parallelgeschaltet sind "gleichzeitig" als Wechselspannungssignal in seiner spezifischen Form "lesen" können.
Das Tempo des Busverkehrs
Die Übertragungsgeschwindigkeit von 9600 Baud ( = Bit pro Sekunde) ergibt dabei den Zeitmaßstab.
1Bit
--------- = 9600Bit/s = 9600 Baud
0,000104s
Die Sicherheit des Busverkehrs
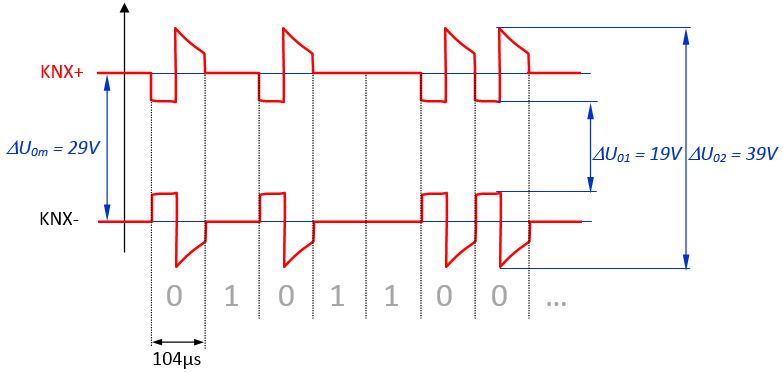
Durch die verwendete Zweidrahttechnik und dem Auswerten der Spannungsdifferenz zwischen den Busdrähten (nicht die Spannung gegen Null ist das Nutzsignal) können Signalstörungen durch äußere Einstreuung großteils vermieden werden. Externe Störsignale sind immer auf beiden Drähten wirksam, wodurch sich aber die Differenz der regulären Bussignale nicht ändert.
Für die kontrollierte Übertragung eines Byte-Nutzinformation werden immer zusätzliche Bits (i.d.R.: 8 + 5 = 13) zur Steuerung der Übertragung benötigt.
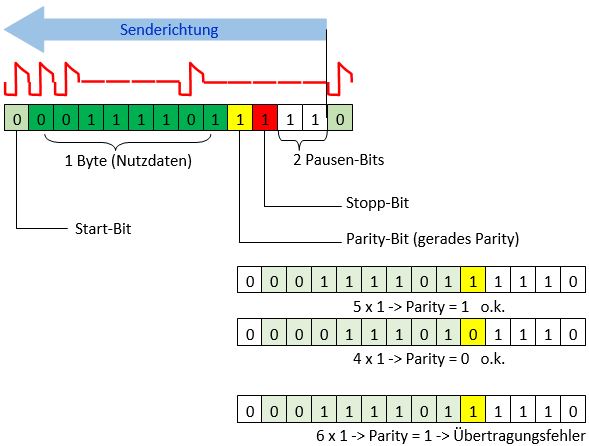
Das Byte mit den Steuerbits zusammen ergeben ein Zeichen
Der Bus führt im Ruhezustand 29V Gleichspannung. Mit der ersten "Null" beginnt also die Übertragung der Zeichenfolge und die TN werden "aufgeweckt" oder "synchronisiert". Das neunte Bit ist jenes für die Prüfung, ob die Anzahl der "1" eine gerade Zahl ist. Wenn nicht, ist P = 1Parität.
Die Kommunikation in einem KNX-Netz erfolgt dezentral. Es gibt keine übergeordnete Zentrale (sog. Arbiter), die den Zugriff der Teilnehmer auf den Bus regelt. Alle KNX-Busteilnehmer können bei Bedarf jederzeit Datentelegramme senden. Um Datenkollisionen zu vermeiden, wird beim KNX-Bus eine Zugriffssteuerung mit dem Carrier Sense Multiple Access with Collision Avoidance (Buszugriffsverfahren mit Kollisionsauflösung)CSMA/CA-Protokoll eingesetzt. Möchte ein Teilnehmer senden, so muß, um Datenkollisionen zu verhindern, der Bus für 5,2ms frei sein.
Der Teilnehmer sendet dann das Telegramm und erhält von allen angesprochenen Teilnehmern nach der Zeit 1,35ms eine Ich habe verstanden engl.:"acknowledge" - ACKQuittung.
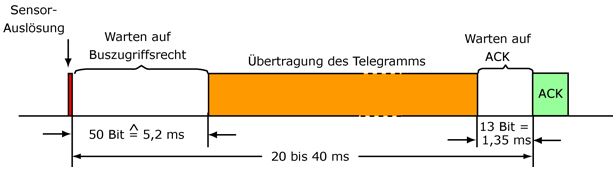
Im Fehlerfall (der Sender erhält nicht innerhalb von 1,35ms ein ACK) wird der Vorgang bis zu dreimal wiederholt. Danach stellt der Sender seine Tätigkeit ein und der NAK = no acknowledgeFehler wird ausgegeben. Die Quittung sorgt also für eine sehr hohe Übertragungssicherheit und verhindert Fehler.
Die Telegramme steuern die Busteilnehmer
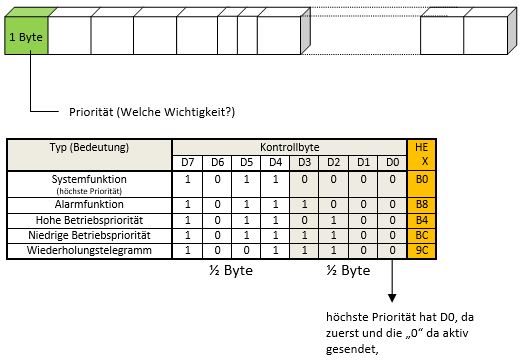
1. Byte
Hier wird der Telegrammtyp markiert (Wiederholung, Alarm oder Höhe der Priorität).
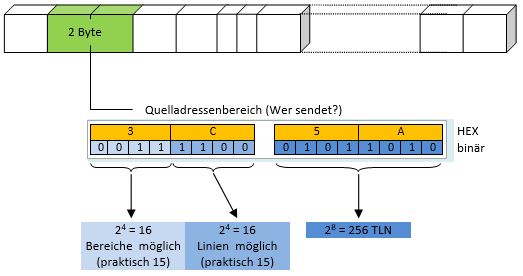
2. und 3. Byte
Hier wird die physikalische Adresse markiert (wichtig ACK).
4. und 5. Byte
Hier wird die physikalische oder die Gruppenadresse markiert (der Unterschied wird folgenden Zeichen gesendet).
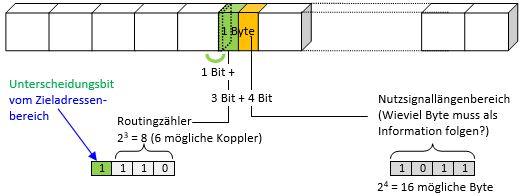
6. Byte
Im ersten Half-Byte wird der Stand des Routingzählers markiert, damit das Telegramm nicht das gesamte Busnetz belegt. Ein Signal darf höchsten 6 Koppler passieren. Bei Überschreitung wird das Signal gelöscht.
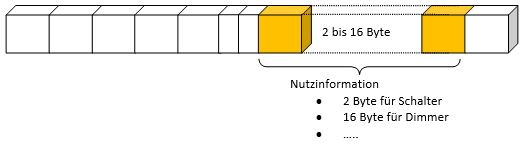
Das zeite Half-Byte markiert die Anzahl der Bytes für das Nutzsignal.Somit ist allen lauschenden TN "klar" wie lange der Bus nun belegt ist..
7. bis max22. Byte
Hier stehen die Steuersignale für die angesprochenen TN.
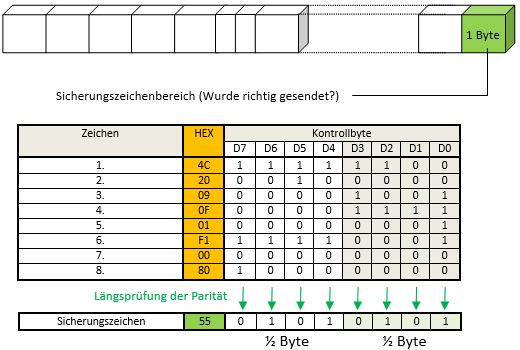
23. Byte
Hier steht das Sicherungszeichen, also das Ergebnis des "Parity-Checks".
Schutzmaßnahme
- KNX wird mit Kleinspannung DC 24V SELV versorgt (Safety Extra Low Voltage = Sicherheits- Kleinspannung)
- Zulässig sind nur die von der KNXA zertifizierten Geräte.
- KNX- Spannungsversorgungen mit (integrierter) Drossel.
Local Control Network (LCN)
Eine sehr kurze Geschichte des LCN
Local Control Network und wird seit 1992 in Deutschland durch die Firma Issendorff Mikroelektronik GmbH entwickelt und wurde seit 1994 in mehreren Tausend Objekten realisiert - vom Wohnzimmer im Einfamilienhaus über Schulen, Verwaltungsgebäude, Industriebauten bis hin zu Hochhäusern und anderen Grossobjekten.
Allgemein
Bei bzw. unter einem konventionellen Schalter (Taster) werden Computermodule eingebaut. Alle Module werden über eine zusätzliche Ader der gewöhnlichen Installationsleitung i.d.R. 1,5 mm2 miteinander verbunden. Über diese Ader tauschen die LCN-Module untereinander Telegramme aus. Die Daten werden seriell mit 9600 bit/s übertragen. In jedem Modul ist die erforderliche Stromversorgung eingebaut. Die Busspannung beträgt ± 30 V zwischen Datenleiter/Neutralleiter, beim Nichtsenden - 9 V. Ein einzelnes Modul bietet immer mehrere Funktionen gleichzeitig z.B. UP-Modul: 6-10 unabhängige Tasteneingänge für konventionelle Taster aller Hersteller, sowie zwei Ausgänge, nutzbar zum Schalten oder zum Dimmen oder um eine Jalousie zu fahren, zudem noch Anschlussmöglichkeit für Temperatur- bzw. Infrarotsensor.
- Alle Module beinhalten neben der Sensorik und Aktorik mehrere Zeitgeber und Verknüpfungen sowie eine Zähl- und Rechenfunktion.
- Das Erfassen und Verarbeiten analoger Messwerte ist möglich.
- Das Tastensignal TIPPEN KURZ, TASTENDRUCK LANG und anschließendes LOSLASSEN kann für Schaltfunktionen genutzt werden.
- Jeder Ausgang wird mit zwei Parametern gesteuert:
- „Helligkeit"
- Geschwindigkeit mit der diese Helligkeit angefahren wird.
- Für die Inbetriebnahme wird die Software LCN-P benötigt.
- Jedes Modul erhält bei der Herstellung eine Fabrikationsnummer, sodass es eindeutig identifizierbar ist.
- Die Abfrage der Fabrikationsnummer, die Vergabe der Identifikationsnummer, die Zuordnung der Funktion sowie die Programmierung der Module erfolgt über eine RS 232-Schnittstelle.
- Funktionsabläufe in einer LCN-Anlage können über eine Visualisierungssoftware mittels eines PC dargestellt und beeinflusst werden.