Lehrstoffverteilungen für
Fachkunde |
Elektrotechnik |
Fachzeichnen |
Laborübungen
Lehrstoffverteilungen für
Fachkunde |
Elektrotechnik |
Fachzeichnen |
Laborübungen Fragen
FragenSTÜ-Elektropneumatik
[LA/EMT]

Wegabhängige Steuerung
Die Zylinder werden indirekt angesteuert, weil die pneumatischen Stellglieder (= Wegeventile)elektrisch betätigt werden.
Lösung mit pneumatischem Speicherglied
Der Endschalter S2 ist in Ruhestellung betätigt. Das Elektroimpulsventil ist das Speicherglied.
Endschalter werden grundsätzlich in unbetätigtem Zustand gezeichnet.
Der Pfeil deutet die Betätigung an.
Die Serienschaltung der zwei Signalglieder [S1] UND [S2] ist wieder gleichbedeutend mit einer UND-Verknüpfung.
Lösung mit elektrischem Speicherglied
Das Impulsventil fällt weg. Aus der zweiten Ventilspzule wird eine Relaisspule.
Die Steuerung oder Logik der Speicherschaltung ist als Selbsthalteschaltung aus der Relaistechnik bekannt.
Die Serienschaltung der zwei Signalglieder [S1] UND [S2] ist wieder gleichbedeutend mit einer UND-Verknüpfung.
Weitere elektropneumatische Steuerungen werden in Fachzeichnen angefertigt.
Beispiele für Folgeschaltungen
Folgesteuerungen sind weg- oder zeitabhängige Steuerungen, bei denen verschiedene Zylinder (oder Aktoren) in einer vorgesehenen Reihenfolge nacheinander angesteuert werden. Wir wollen die selben kleinen Vorrichtungen wie im Kapitel Pneumatik noch einmal betrachten:
Biegevorrichtung
Nach einem Startsignal soll der Spanner (A) ausfahren und das Werkstück halten. Nach dem Erreichen der vorderen Position des Spanners, soll der Biegezylinder (B) ausfahren.
Wenn der Biegezylinder fertig ist, fährt zuerst der Spannzylinder zurück. Ist das Werkstück entspannt, kann auch der Biegezylinder in die Grundstellung zurückfahren.
Anlagenschema:
Bewegungsabfolge:

Weg-Schrittdiagramm:
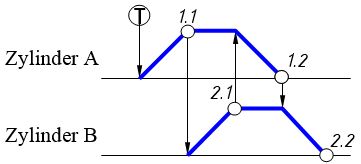
In Worten lautet die Bewegungsabfolge (ersichtlich aus dem Weg-Schrittdiagramm):
- Drücken der Startaste → ausfahren von A
- A erreicht Position 1.1 → ausfahren von B
- B erreicht Position 2.1 → rückfahren von A
- A erreicht Position 1.2 → rückfahren von B
Steuerungsschema:
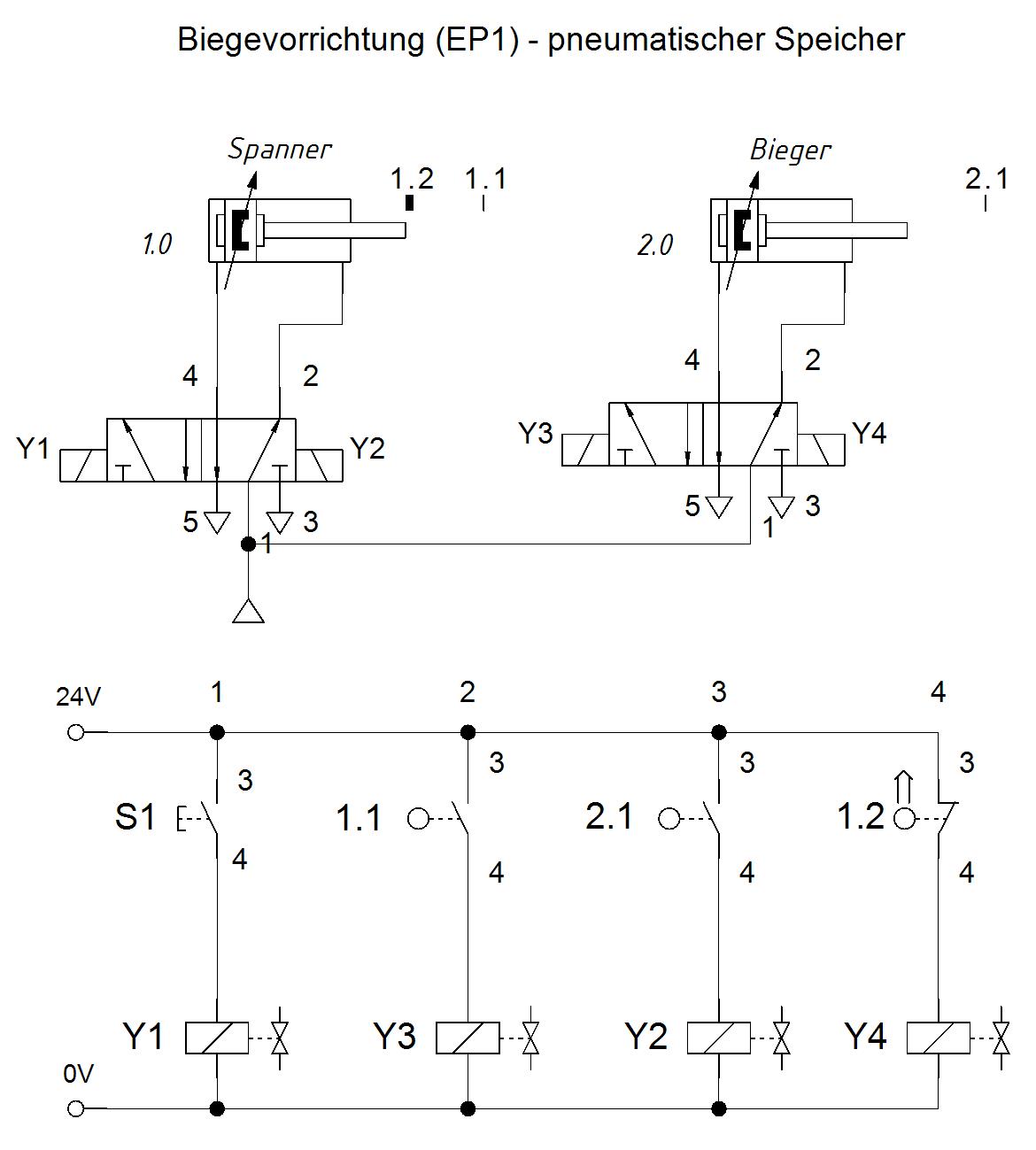
Wir wissen schon aus der rein pneumatischen Steuerung, dass die Signale für diesen Ablauf genau in der idealen Reihenfolge kommen. Der Ablauf läßt sich auch mit elektro-mangnetisch betätigten Imulsventilen ganz einfach und problemlos realisieren.
Lochstanze
Funktionsbeschreibung:
Nach einem Startsignal fährt der Locher aus und gleich wieder in seine Grundstellung zurück. Erreicht der Locher die Grundstellung, wird der gelochte Papierstapel ausgeschoben.
Anlagenschema:
Bewegungsabfolge:

Weg-Schrittdiagramm:
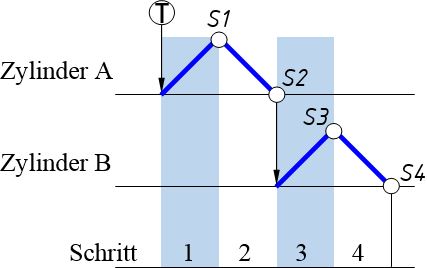
In Worten lautet diese Bewegungsabfolge (ersichtlich aus dem Weg-Schrittdiagramm):
- Drücken der Startaste → ausfahren von A
- A erreicht Position S1 → rückfahren von A
- A erreicht Position S2 → ausfahren von B
- B erreicht Position S3 → rückfahren von B
Steuerungsschema:
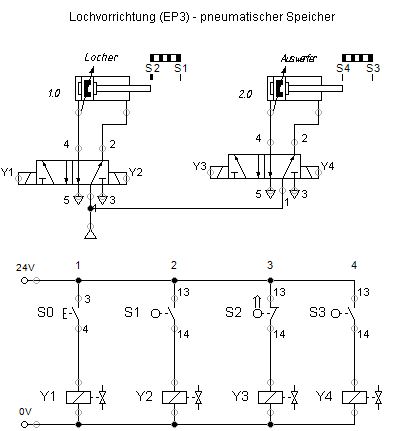
Wie schon aus der rein pneumatischen Steuerung klar wurde, kommt es nun durch die Anordnung der Signalgeber zu einer Signalüberschneidung. Das Signal von S2 kommt "zu früh"! Der Zylinder B darf erst gestartet werden, wenn Zylinder A bereits gestartet und wieder in Grundstellung zurückgefahren ist.
Mit einem Zwischenspeicher kann das Signal von S2 zu richtigen Zeit, wenn Zylinder A seine Arbeit getan hat, den Zylinder B starten:
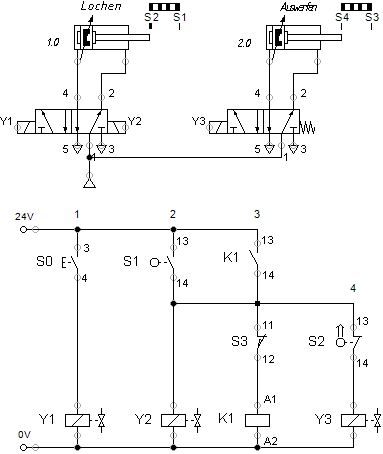
Schrittkette
Die einfachste (beste) Lösung, Abläufe zu steuern, ohne eine Signalüberschneidung zu riskieren, ist die mit einer Schrittkette. Jede Bewegung wird in einem Schritt ausgeführt, der einen Speicher repräsentiert und dabei immer Bedingung ist, damit überhaupt der nächste Schritt ausgeführt werden kann. Verwendet man pneumatische Speicher sieht das so aus:
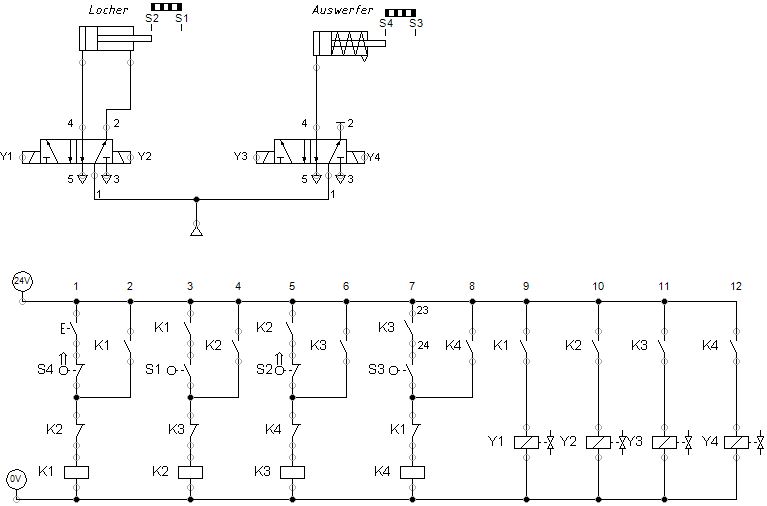
Verwendet man elektrische Speicher sieht das so aus:
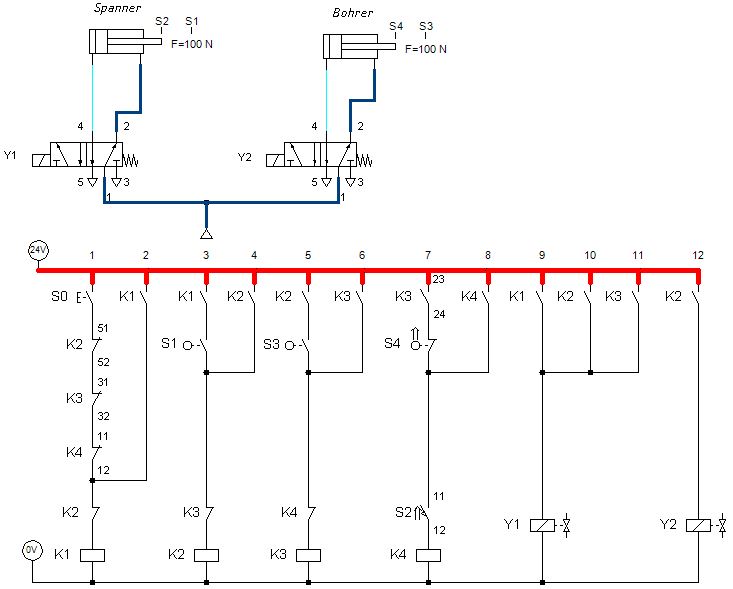
Bohrmaschine
Funktionsbeschreibung:
Nach einem Startsignal soll der Spanner ausfahren und das Werkstück halten.
Ist er vollständig ausgefahren, das Werkstück also eingespannt, soll der Bohrer ausfahren.
Wenn der Bohrer ausgefahren ist, fährt er selbständig zurück. Ist der Bohrer in Grundstellung, kann der Spanner den Teil lösen, also zurück fahren
Alagenschema:
Bewegungsabfolge:

Weg-Schrittdiagramm:
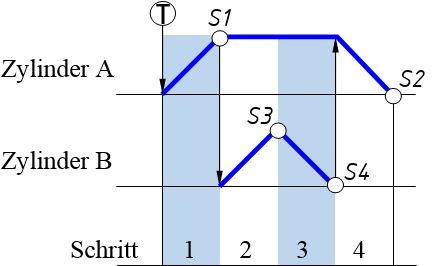
Dieser dritte Bewegungsablauf lautet in Worten:
- Drücken der Startaste → ausfahren von A
- A erreicht Position S1 → ausfahren von B
- B erreicht Position S3 → rückfahren von B
- B erreicht Position S4 → rückfahren von A
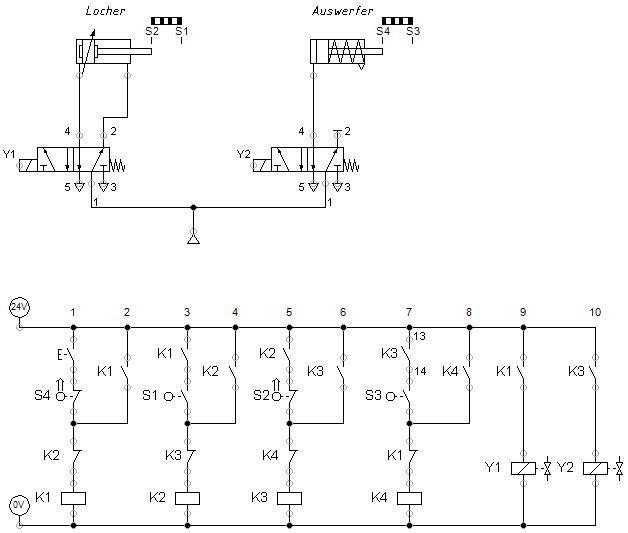
Steuerungsschema:
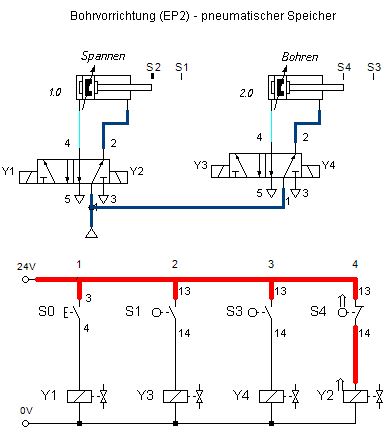
Auch in diesem Ablauf - wie schon bei der rein pneumatischen Steuerung - dürfen wir uns nicht nur auf den bloßen Bewegungsablauf konzentrieren, und die Setz- sowie Rücksetzsignale einfach dem geforderten Ablauf entsprechend anschließen. Weil der Zylinder A schon in der Grundstellung durch das Signal von S4 zurückgestellt wird kann er durch S0 gar nicht gestartet werden. Ein herrlicher Fall für eine Signalüberschneidung.
Abhilfe schafft auch hier die Schrittkettentechnik:
Schrittkette
Die einfachste (beste) Lösung, Abläufe zu steuern, ohne eine Signalüberschneidung zu riskieren, ist die mit einer Schrittkette. Jede Bewegung wird in einem Schritt ausgeführt, der einen Speicher repräsentiert und dabei immer Bedingung ist, damit überhaupt der nächste Schritt ausgeführt werden kann.
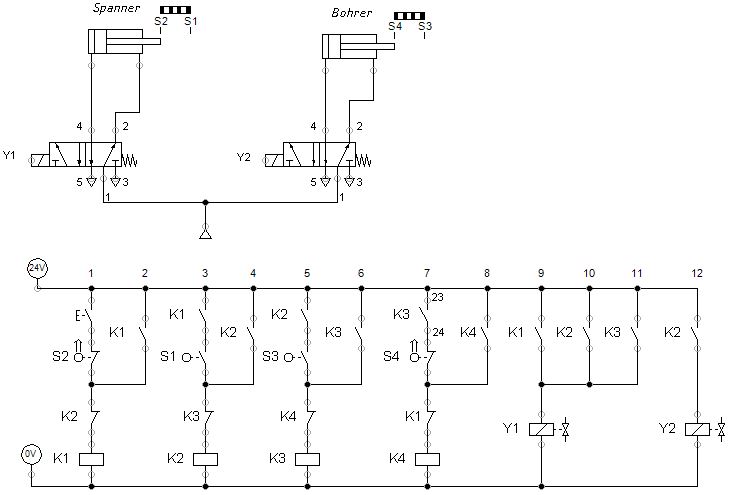
Der richtige Start
Probleme bei der Schrittkettenprogrammierung rühren immer von händisch (menschlich) betätigten Schalter. Es ist erforderlich, das Startsignal immer nur am Beginn der Schrittkette wirksam werden zu lassen. Nach einem Durchlauf bleibt ja der letzte Speicher eingeschaltet und verbrät unnütz Strom.
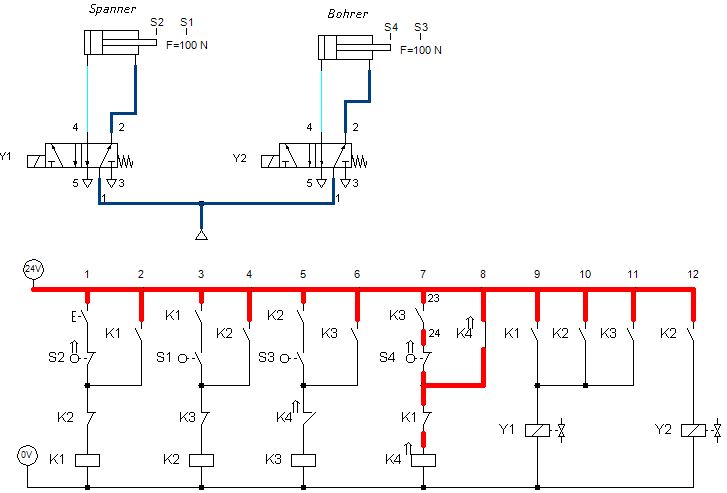
Wenn man mit Erreichen des letzten Positionsgebers (S2) im Ablauf auch den letzten Speicher (K4) löscht, kann als Bedingung für einen Neustart die restlos gelöschte Schrittkette verwendet werden. In der Prxis heißt das, jeder Schrittspeicher (K2 - Schritt2; K3 - Schritt 3 und K4 - Schritt 4) bekommt einen Öffnerkontakt im ersten Strompfad, in dem der erste Schritt (K1) gesetzt wird.